Rigid Body Representations¶
this is out of date, concepts are similar, but constructs in rpxdock are named and behave differently
Basic element of structure is a “rigid” chunk of protein structure called a Rose. This “rigid” structure may actually be a family of related conformations, if a proper hierarchical decomposition of conformations can be made.
Kinematic model is Roses and SymElems placed by a “scene tree” type structure called a Bouquet. All DOFs, including transforms which place entities in the tree, helical symmetry DOFs, and Rose conformations, are managed by hierarchal nested grids called Nests. Here is a silly example:
Scheme Bouquet Illustration
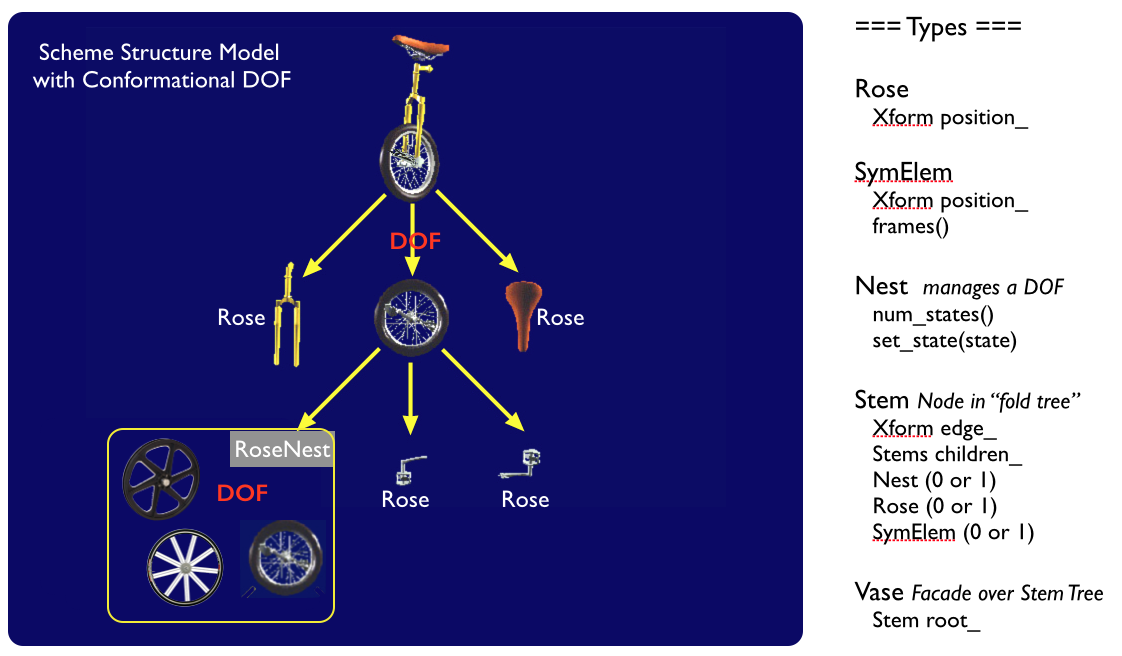
Here is the proposed object structure, which provides [1] efficient representation of multiple identical bodies in different positions (symmetry, multiple threads, etc…), [2] Interactions indirected WRT rigid body position and conformation choice.